 |
||||
|
||||
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
 | |
Robotergestütztes chirurgisches Assistenzsystem für Eingriffe an der Wirbelsäule
|
Projektpartner: |
|
|
| 4plus GmbH, Erlangen, Deutschland |
| Deutsch |
|
|
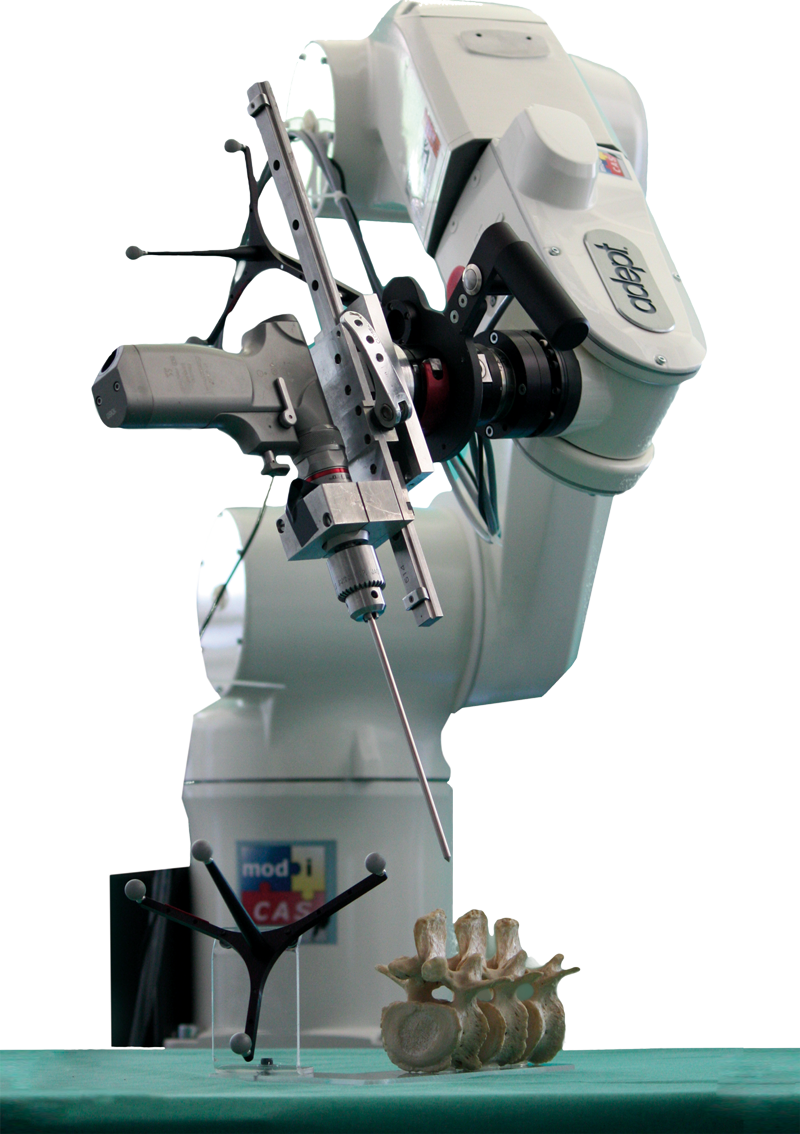
Das Ziel des Projektes liegt darin, Genauigkeit und Reproduzierbarkeit von chirurgischen Eingriffen an der Wirbelsäule zu verbessern. Die Basistechnologie des modiCAS Assistenzroboters wird dazu angepasst, um die bei Wirbelsäulen-OPs häufig erforderliche Platzierung von Pedikelschrauben zu unterstützen. Diese Schrauben dienen dazu, zwei oder mehr Wirbel durch Titanstäbe kraftschlüssig miteinander zu einem festen Element zu verbinden. Die Wirbelsäule wird in diesem Bereich versteift (Spondylodese), um bestehende Probleme durch Instabilität oder Frakturen zu beheben. Dabei ist entscheidend für das Ergebnis des Operation, dass die Schrauben sehr genau in der Mitte der Pedikel der Wirbel platziert werden. Dies verhindert auf der einen Seite eine Beschädigung der empfindlichen Nerven im Wirbelkanal, und auf der anderen Seite wird so die erforderliche hohe Steifigkeit des Befestigungssystems erreicht. |
|
|
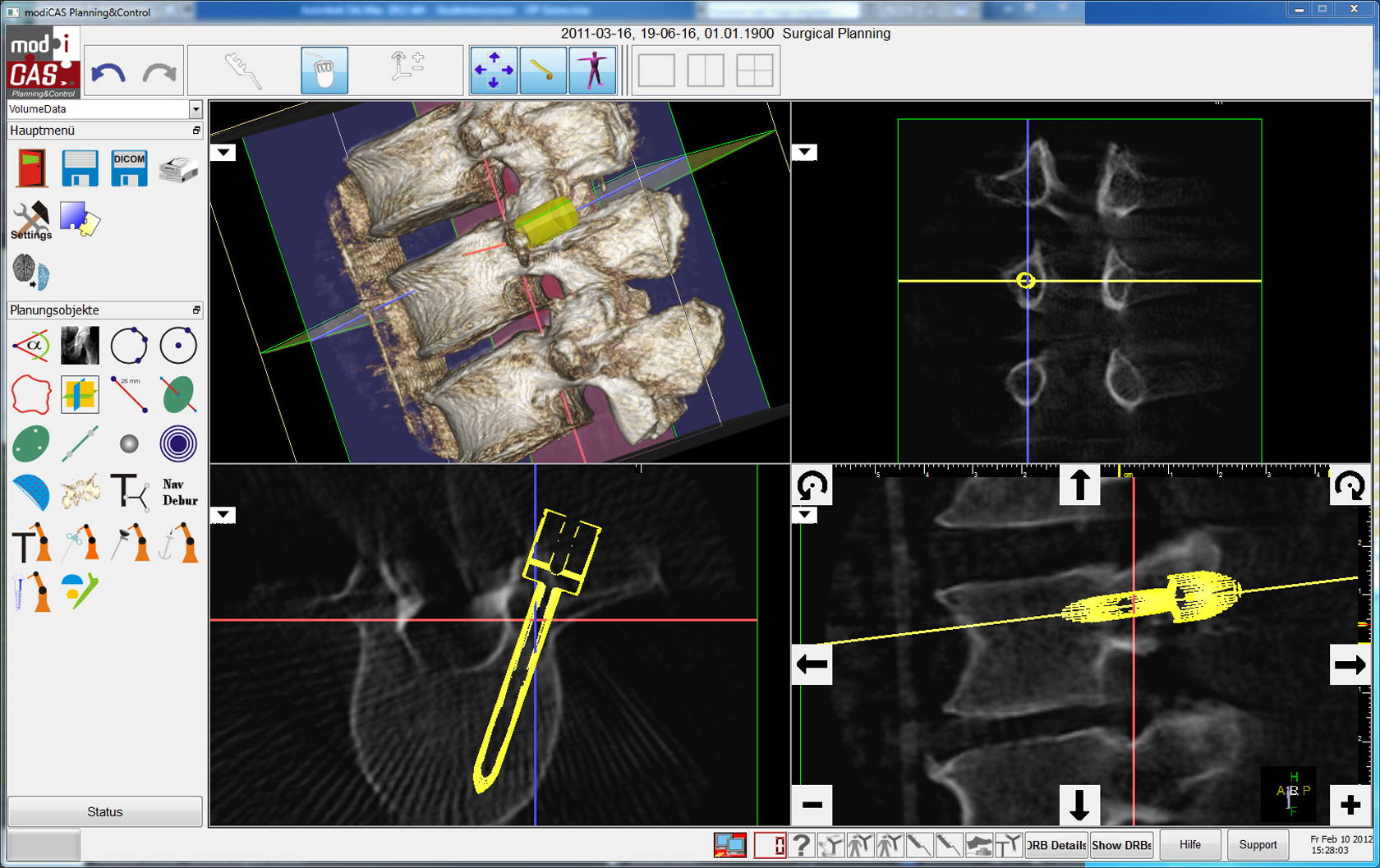
Die Projektpartner werden prototypische Lösungen für alle Module entwickeln, die für die präoperative 3D-Planung der Sollpositionen der Pedikelschrauben, für die Registrierung von Bilddaten und der Anatomie des Patienten und für die interaktive Steuerung des Assistenzroboters benötigt werden. Besonderes Augenmerk wird auf eine intuitive Mensch-Maschine-Schnittstelle gelegt, um die Handhabung des Systems für den Chirurgen so einfach wie möglich zu gestalten und die potenziellen Vorteile des neuen Ansatzes auszunutzen. Im Vergleich zur herkömmlichen manuellen Chirurgie lässt er eine hohe reproduzierbare Genauigkeit bei geringen Fehlerquoten erwarten. Darüber hinaus ist der roboterbasierte Ansatz sehr gut geeignet, um neue, minimal invasive Operationstechniken zu unterstützen. |
|
| |
|
| English | |
|
|
The main objective is to improve quality and results of surgical interventions at the spine. The basic technology of the modiCAS surgical assistance robot which has been developed in previous research projects by the ZESS team will be tailored to a specific application, the placement of pedicle screws in spinal fusion procedures. In such procedures, two or more vertebrae are permanently joined (“fused”) together into one solid element in order to prevent pain-causing motion for example in cases of spine instability, disc disease, or fractures. To achieve this, pedicle screws have to be fixed in the vertebral bodies above and below the lesion and rigidly connected by titanium rods. The very accurate placement of the screws in the center of the pedicles is crucial for the result of the procedure. This prevents damage of the sensitive nerves in the spinal canal on the one hand, and on the other hand assures the necessary high stiffness of the fixation system. The project partners will design all modules needed for pre-operative 3D planning of the pedicle screw locations, registration of image data and patient anatomy, and interactive control of the assistance robot. Particular emphasis will be put on the development of an intuitive and robust man-machine-interface to exploit the potential benefits of the computer- and robot-supported approach. Compared to conventional manual surgery high reproducible accuracy and less error rates can be expected. Furthermore the robot-based approach is well suited to support new less invasive surgical techniques. |
| gefördert als Kooperationsprojekt im ZIM-Programm des BMWi |
|
ZESS Webmaster Team 2024 Disclaimer