 |
||||
|
||||
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
 | |
Entwicklung
eines modularen Systems zur
computergestützten Durchführung chirurgischer
Eingriffe
|
Projektpartner Forschung: |
||
|
|
||
| Orthopädische
Universitätsklinik Frankfurt, Prof. Dr.med. Fridun Kerschbaumer |
||
|
|
||
| NDI Europe GmbH, Radolfzell | Micro Mechatronic Technologies AG, Siegen | DePuy Orthopädie GmbH, Sulzbach |
| Mechatronic GmbH, Darmstadt | DIMAS GmbH, Siegen |

| Deutsch |
|
|
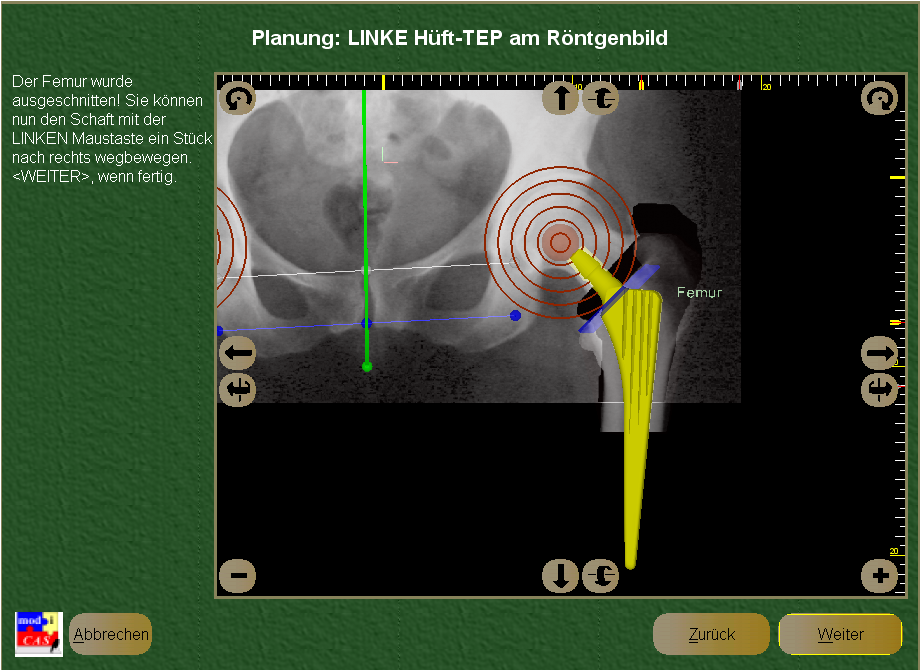
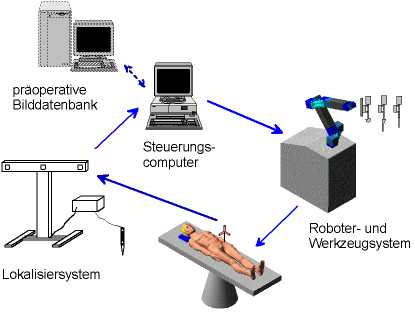
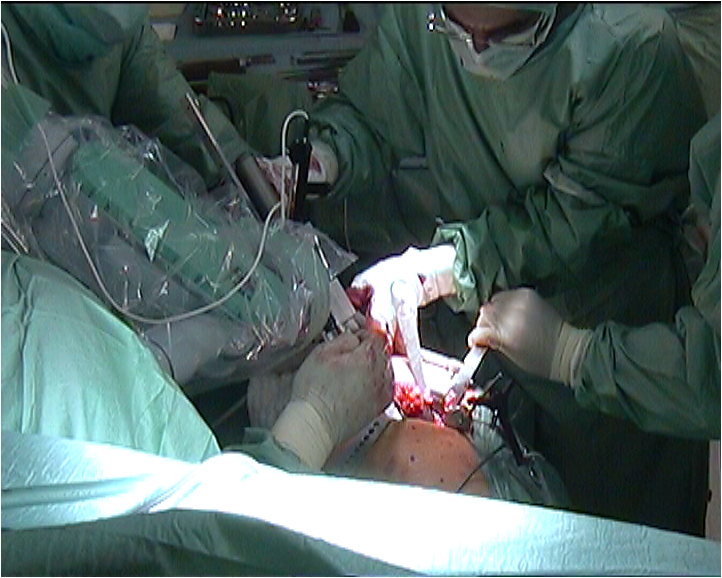
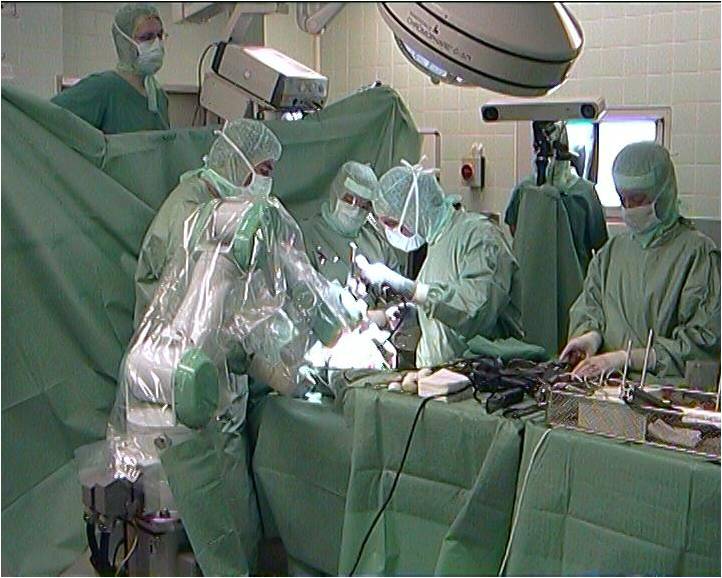
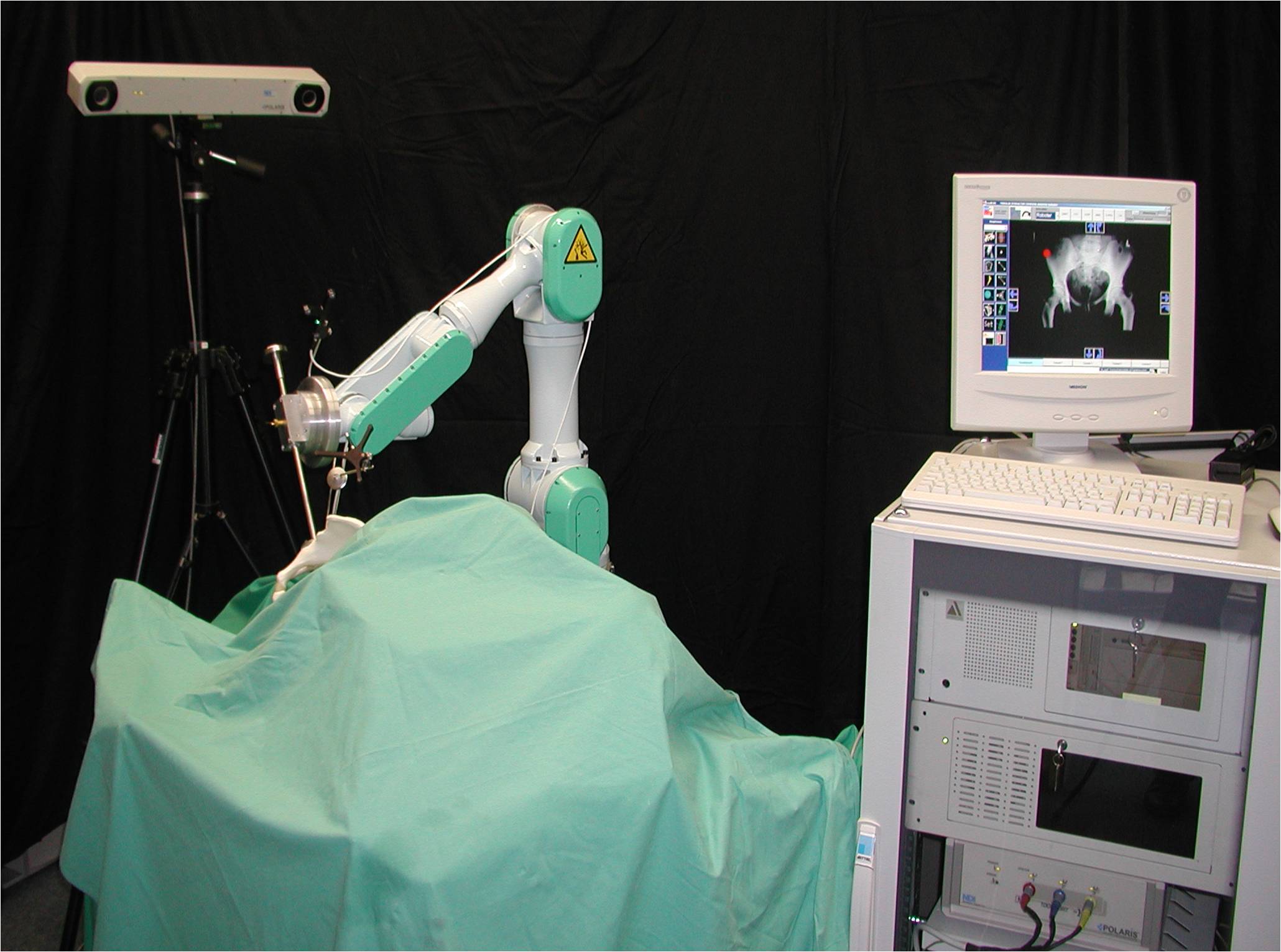
Im Rahmen dieses Projektes sind computergestützte Verfahren und Werkzeugsysteme entwickelt worden, mit deren Hilfe wesentliche Verbesserungen bei der Durchführung chirurgischer Eingriffe erzielt werden können. Das vorgeschlagene Konzept unterstützt alle Stufen von der präoperativen Planung bis zur robotergestützten Ausführung im Operationssaal und erfüllt drei wesentliche Zielvorgaben, um eine möglichst breite Anwendung zu erreichen: Modularer Aufbau, interaktive Bedienung, universelle Einsatzmöglichkeiten. Einen besonderen Schwerpunkt der Projektarbeiten stellt die Entwicklung eines neuartigen, navigierten Chirurgie-Robotersystems dar, dessen Konzept sich grundlegend von dem bisher bekannter Operationsroboter unterscheidet. Es ist als mechatronisches Assistenzsystem ausgelegt, das den Operateur durch sehr genaue Positionierung und Führung der chirurgischen Instrumente unterstützt. Der Operateur wird durch die interaktive Arbeitsweise nicht ersetzt, sondern insbesondere bei neuen minimal invasiven Eingriffen dort unterstützt, wo der menschlichen Wahrnehmungsfähigkeit und dem menschlichen Geschick Grenzen gesetzt sind. Während der Projektlaufzeit ist ein Prototypsystem fertig gestellt und in der Hüftchirurgie mehrfach klinisch erprobt worden. Dabei wurden weltweit erstmalig die Pfannenprothesen des künstlichen Gelenks mit Roboterunterstützung implantiert. Die Komponenten dieses erfolgreichen Prototypsystems stellen die Ausgangsbasis für weitere Forschungsprojekte und die angestrebte kommerzielle Verwertung der erzielten Projektergebnisse dar. |
 |
 |
|
|
English |
|
In this project, computer-based procedures and innovative medical tool systems have been developed to achieve significant improvements in the performance of surgical interventions. The proposed concept supports all steps of the intervention from preoperative planning up to robot-assisted execution in the OR. The development process has been guided by three main objectives, which are modular structure, interactive man-machine interface, universal applicability. Particular emphasis has been put on the development of a novel navigated surgical robot system, the concept of which completely differs from existing solutions. It is been designed to operate as a navigated mechatronic assistance system, supporting the surgeon by very precise positioning and guiding of surgical instruments. There is no fully automatic operating mode which could replace the surgeons manual activity. System operation is instead characterized by interactive modes which support the surgeon in those parts of the intervention where human skills are limited. In course of the project a prototype system of the navigated surgical robot has been set up. It has been successfully validated several times in clinical application, being the first robotic system in the world to support the implantation of the acetabular cup prosthesis in total hip replacement surgery. The components of the successful prototype system form the platform for further research projects and the commercial exploitation of the project results. |
| gefördert aus dem InnoNet-Programm des BMWi |
ZESS Webmaster Team 2024 Disclaimer